En la configuración final, REMS está compuesto por cuatro módulos: dos booms (pequeños cilindros), sensor ultravioleta (UV) y electronica de control (ICU) que aloja al sensor de presión.
Debido a la configuración del rover, no ha sido posible que todos los sensors de REMS estén juntos, ni en la más óptima para realizar sus medidas.

Boom 1 y 2 en la preparación par alas pruebas ambientales. Los sensors de viento están localizados en la parte superior de los booms. El sensor de temperatura del aire en la parte inferior. Temperatura del suelo y humidad en el cuerpo del boom, que también aloja la electrónica de acondicionamiento.
El sensor de viento registra la velocidad y dirección del viento en tres direcciones. Está compuesto por tres sensores que miden la velocidad y dirección del viento en un punto muy cercano al cuerpo del boom; cada uno se basa en anemometría de lamina caliente. La calibración del sensor permitirá transformar los datos leidos por los tres sensores en dirección y velocidad del viento incidente. No obstante, estos datos deberán ser de nuevo corregidos para tener en cuenta la perturbación del mastil y del propio rover.
El sensor de temperatura del suelo está formado por tres termopilas situadas en el Boom 1 y que mira hacia uno de los laterales del rover. Los rango de trabajo de las termopilas son: 8-14, 15, 16-20 micras. Estas bandas se han seleccionado por un lado tratando de evitar la absorción del CO2 (primera y tercera) y por otro evaluar su posible efecto (banda segunda). Con ellas es posible trabajar en el rango de temperaturas especificado (100 a 373 ºK) consiguiendo una precisión mejor de 5 ºK.
La temperatura del aire se registrará en ambos booms con un sensor tipo PT1000 situado en el extremo de una pequeña varilla, de longitud suficiente para estar fuera de la capa limite del mástil y del boom. Su rango de medida va de 150 a 300 ºK, y su precisión 5 ºK.
El Boom 2 aloja el sensor de humedad relativa. Este sensor lo desarrolla el FMI y está basado en un desarrollo de la empresa finlandesa Vaisala. Esta colocado dentro de cilindro protector del polvo y mide la humedad relativa con una precisión mejor del 10% entre 203 y 323 ºK.
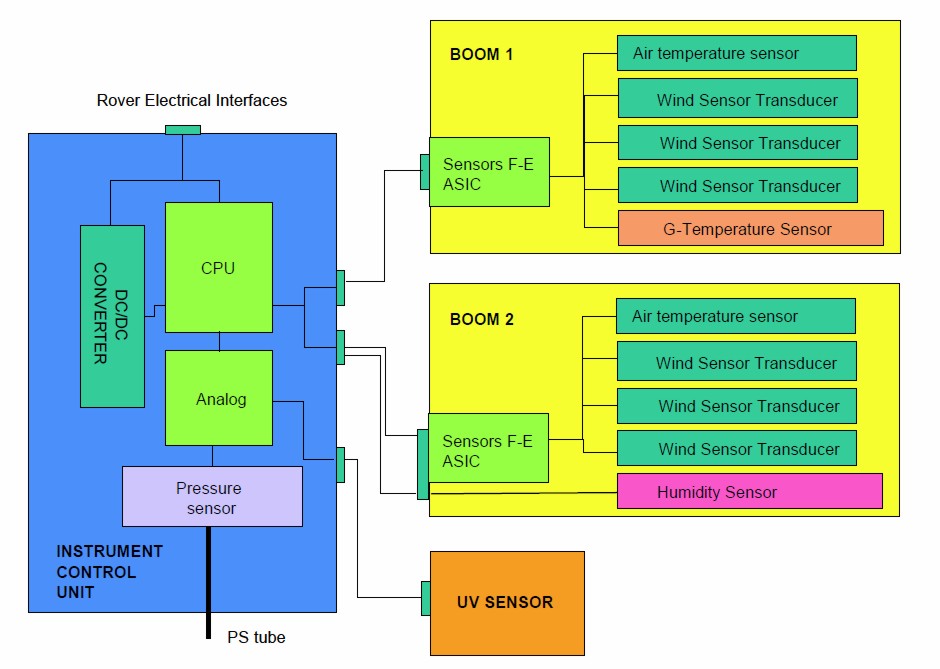
Diagrama de bloques de REMS
Dos de las principales restricciones en el diseño de REMS han sido la necesidad de sobrevivir y operar en un rango de temperaturas muy bajas y la limitación de masa, del conjunto del instrumento, a 1.3 kg. Ambas condiciones han hecho que sea necesario el desarrollo de un ASIC para el acondicionamiento de los datos que leen los senores de los booms y que debe sobrevivir desde -130 ºC a 70 ºC, minimizando el consumo de potencia.
El senor ultravioleta está situado en la parte superior del cuerpo del rover y se compone de seis fotodiodos: 335-395 nm (UVA), 280-325 nm (UVB), 220-275 nm (UVC), 210-380 nm (dosis total), 245-290 nm and 310-335 nm (estas dos últimas bandas han sido seleccionadas para comparar con la lecturas que realiza MRO). La precisión de las medidas es mejor del 5% en todo el rango. Por la situación del sensor, no tiene ninguna protección frente a la deposición de polvo. Para mitigar este efecto, se han colocado imanes alrededor de cada uno de los fotodiodos con objeto. Los campos magnéticos de los imanes desvían la partículas de polvo cargadas eléctricamente. No obstante, se evaluará el nivel de polvo depositado mediante la toma de imágenes del sensor y por comparación con referencias de laboratorio.
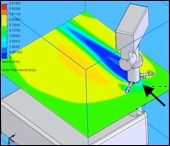
Simulación de la interacción del viento con el mastil del rover. Los diferentes colores representan diferentes velocidades y por lo tanto se puede estimar el nivel de perturbación de la corriente incidente.
El sensor de presión lo ha desarrollado el FMI y está basado en un transductor de Vaisala. Está localizado en el interior del cuerpo del rover y conectado con el exterior por un orificio, suficientemente protegido para minimizar la deposición del polvo. Su rango de medida va desde vacio hasta 1150 Pa, con una precisión (al final de su vida operativa) mejor de 10 Pa. La precisión relativa (repetibilidad en la escala de tiempo en horas) es inferior a 2 Pa. Como este sensor está en contacto con la atmósfera marciana, es necesario un filtro HEPA que evite cualquier tipo de contaminación desde el sensor a la atmósfera.
Sensor de viento (WS)
El sensor de viento mide la velocidad y dirección del aire en tres puntos del cilindro. Combinando estos datos es posible calcular la dirección y velocidad del viento incidente sobre el boom.
En cada punto se utiliza un sensor de lamina caliente. La velocidad del aire es proporcional a la corriente necesaria para mantener la lamina a una temperatura constante. [más]
Sensor de temperatura del suelo (GTS)
La única forma de medir la temperatura de un cuerpo sin contactar con él, es midiendo la radiación infrarroja que emite. Este precisamente es el método que utiliza este sensor; recoge la radiación emitida por el suelo y estima su temperatura. [más]
Sensor de temperatura del aire (ATS)
En éste caso se utiliza un sensor de temperatura colocado en el extremo de una pequeña barra fabricada con una material que tiene una baja conductividad térmica. Al estar el sensor cerca del cuerpo del boom, su medida estará alterada por éste. Este efecto se corrige con la medida de un segundo termistor colocado en el interior de la barra. [más]
Sensor de humedad relativa (RHS)
Este sensor estima la humedad relativa del aire a través del cambio en la capacitancia de una lamina cuando se depositan en ella moléculas de agua. Para proteger el sensor de la deposición de polvo, éste se ha colocado dentro de capsula de teflón blanco. [más]
Sensor ultravioleta (UVS)
El sensor ultravioleta es una pequeña caja que aloja los seis fotodiodos y los seis imanes que los rodean. Un séptimo imán esta colocado en el centro para estimar la cantidad de polvo depositado en la caja. Un termistor situado sobre uno de los fotodiodos sirve para la corrección de sus lecturas.[más]
Sensor de presión (PS)
Este sensor mide la variacion de capacida entre dos placas debida a la variación de la presión ambiental. Dentro del sensor hay varios cabezales de medida. [más]