1. Description General del REMS GTS.
El GTS mide la temperatura cinemática de la superficie marciana integrando la energía infrarroja irradiada por el suelo. El GTS se encuentra en uno de los booms de REMS colocado en el mástil del rover Curiosity de NASA a una altura de 1,6 m. El boom incluye la electrónica empleada para amplificar las señales de las termopilas. Para evitar los efectos locales de temperatura, el GTS enfoca un área con forma elipsoidal de superficie de alrededor de 100m2, midiendo su temperatura media. El campo de visión (FOV: del inglés Field of View) y su orientación fue seleccionada para evitar la visión directa del Rover, sin embargo no está lo suficientemente lejos del Rover para descartar su influencia, especialmente la contaminación térmica del generador (RTG).
Tabla 1.
GTS características generales (sin electrónica) y las prestaciones necesarias
| Propiedad GTS | Valor |
| Dimensiones | 40 x 28 x 19 mm |
| Masa | 20 g |
| Temperatura rango (TC) (Min-Max) | 150–300 ºK |
| Rango Temperatura suelo | TC ±40 ºK |
| Resolución | 0,1 ºK |
| Accuracy | ±5 ºK |
| Campo visual (FOV) | 60º(horizontal), 40º(vertical) |
1.1. Diseño Mecánico
La estructura mecánica del GTS se basa en un diseño ad-hoc que trata de hacer frente a las restricciones impuestas a REMS, como son la falta de un sistema de control de estabilización de temperatura y la imposibilidad de utilizar chopeadores debido a restricciones mecánicas y de consumo de potencia. Así, la estructura mecánica del sensor se compone de una pieza de metal que incluye a los detectores de infrarrojos, y que funciona como masa térmica para garantizar una aceptable deriva en detector. Por otra parte es necesario un sistema de calibracion en vuelo debido a la gran cantidad de polvo existente en la atmósfera de Marte y a la larga duración de la misión, lo cual puede implicar la acumulación de polvo en la óptica de los detectores y llevar al deterioro de las señales que estos producen.
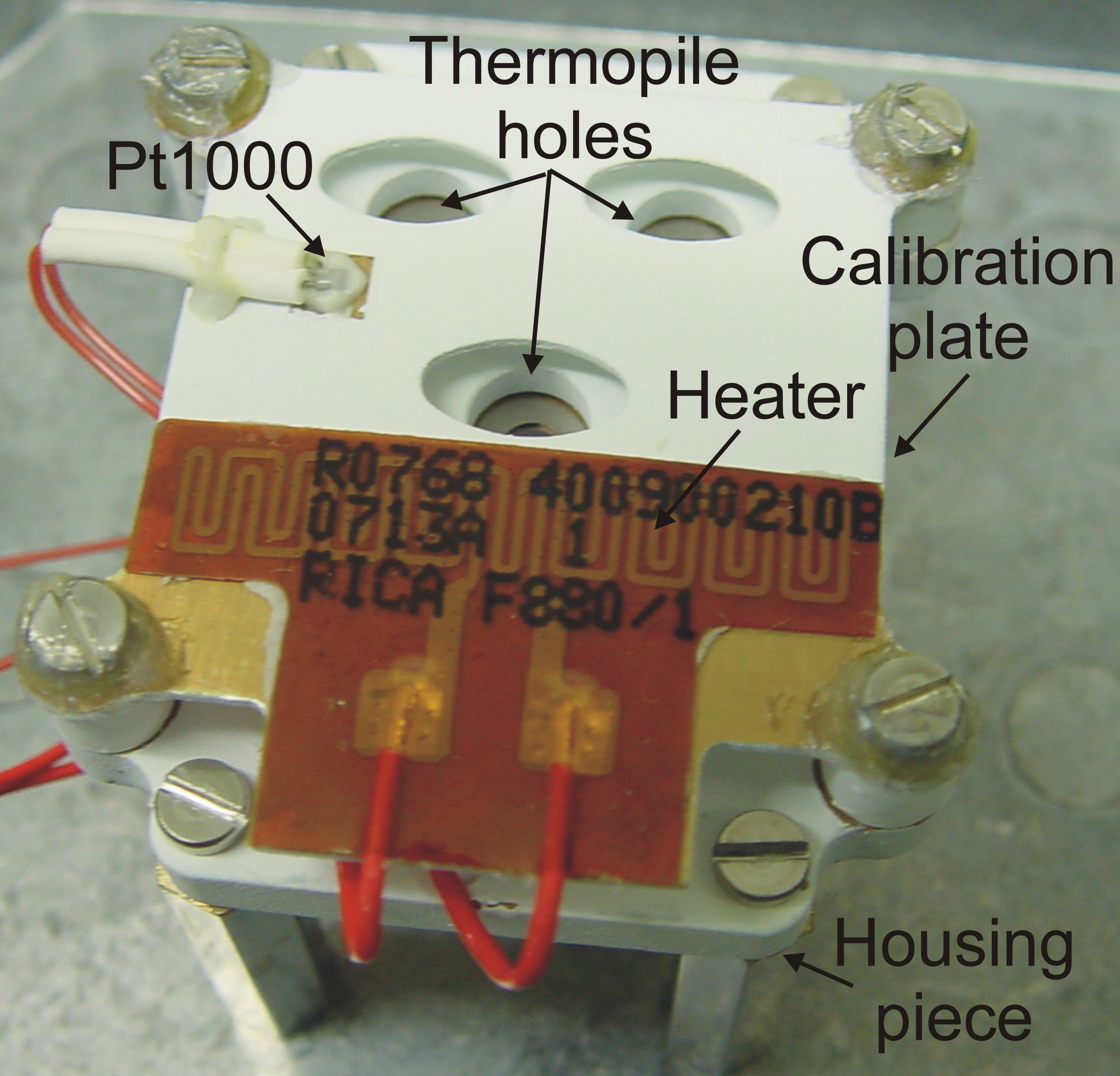
Figura 1. Una fotografía del modelo de vuelo del REMS GTS. (Credit: Sensors 10 (2010))
Este sistema es implementado por una placa de calibración con poca masa y alta emisividad (Figura 1). Dicha placa puede ser calentada y se coloca delante de la pieza de alojamiento de las termopilas. Cada detector IR ve el suelo a través de un agujero en la placa y por lo tanto, parte del campo de visión está obstruido por el sistema de calibración, lo que limita el ángulo sólido de medición (Tabla 1).
La placa de calibración se calienta mediante una resistencia eléctrica alojada entre dos capas de poliamida, un aislante flexible. La temepratura de la placa se mide con un detector de temperatura Pt1000, adherido a la superficie. Este sistema de calibración, sin partes móviles evita complicados y costosos sistemas comerciales de purga de aire para mantener la ventana del sensor libre de polvo.
1.2. Detectores Infrarrojo
Los detectores infrarrojos del GTS son termopilas. Éstos pequeños, ligeros y capaces de funcionar en casi cualquier temperatura, son . Además, son sensibles a todos los espectros IR, relativamente baratos y requieren de una electrónica sencilla de lectura, lo que permite una mayor reducción en el peso y el tamaño del instrumento completo. Las termopilas puede funcionar sin la necesidad de de sistema de control de temperatura, debido a que son menos sensibles que otros detectores a la aparición de gradientes térmicos.
Sin embargo, las termopilas no son piezas estándar para aplicaciones espaciales y en la actualidad no estan formalmente calificados para uso espacial . No obstante, cabe señalar que el infrarrojo térmico Mapper (IRTM), realizado en la misión Viking, y el experimento MUPUS-TP en la misión Rosetta han demostrado la idoneidad de este tipo de detector para medir objetos a bajas temperaturas en condiciones espaciales. El modelo seleccionado para la termopila REMS es el TS-100, del Instituto de Tecnología Física de alta densidad (IPHT) en Jena (Alemania), encapsulado sin ningún sistema óptico, sino con un filtro como ventana de la termopila . Las termopilas tienen una atmosfera inerte interna formada por un gas aislante y no corrosivo. Además, incluyen un Pt1000 para medir la temperatura en la base de su carcasa, que actúa como una referencia de temperatura para la unión fria de los termopares internos.
Tabla 2. Características de las termopilas del GTS
| GTS Item | Longitud de onda Sensibilidad |
Uni. | Rango Min-Max |
Sensibilidad Min-Max |
| Termopila A (Grupo de termopares) |
8-14mm (transmitancia media 75%) |
Voltios | ±1,6mV | 35-70mV/ºK |
| Termopila B (Grupo de termopares) |
15,5-19mm (transmitancia media 65%) |
Voltios | ±0,64mV | 12-16mV/ºK |
| Termopila C (Grupo de termopares) |
14,5-5,5mm (transmitancia media 65%) |
Voltios | ±0,25mV | 4,7-6,6mV/ºK |
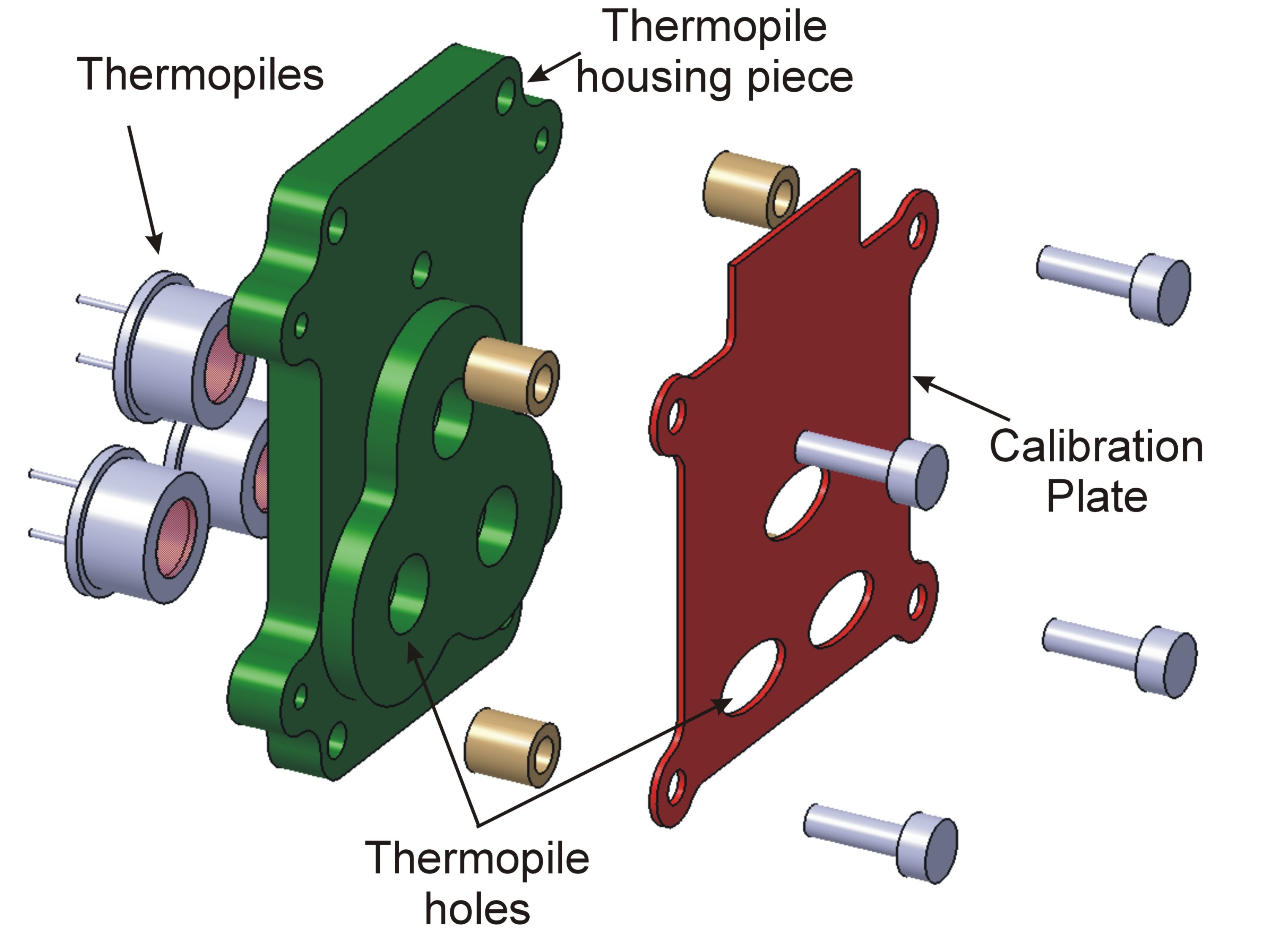
Figura 2. El diseño mecánico en 3D de REMS GTS (Crédito: Sensores 10 (2010))
.
El GTS utiliza tres termopilas en tres canales diferentes (longitudes de onda infrarroja) A, B y C (Tabla 2). Las dos primeras bandas están optimizados para los rangos superior e inferior de la temperatura marciana del suelo. Ley de Wien estable que el máximo de emisión espectral de un cuerpo negro a una temperatura dada viene dada por μmax [m] = 2898 / T [º K]. Si las temperaturas máximas y mínimas de Marte son de 300 º K y 150 º K, entonces el sensor está diseñado para funcionar de forma óptima en el rango de 9.9μm a 19.3μm. Además, las mediciones deben ser realizadas dentro de un rango donde la proporción de radiación infrarroja emitida por la superficie de Marte con la radiación solar IR reflejada por la superficie marciana, por emisividades típicas del suelo de Marte, sea considerablemente mayor que uno. Esta condición se obtiene por encima de 8μm, donde la radiación solar reflejada es menor que el 0,5% para la temperatura más baja. Finalmente, la última restricción para la selección de estas bandas es la de evitar la banda de absorción de CO2 en la atmósfera centrada en 15μm y con ancho de banda de 1μm, el principal componente de la atmósfera marciana. La tercera termopila C se centra en la banda de absorción de CO2. Esto permite determinar la influencia residual para las otras dos bandas de esta absorción.
1.3. Diseño Eléctrico.
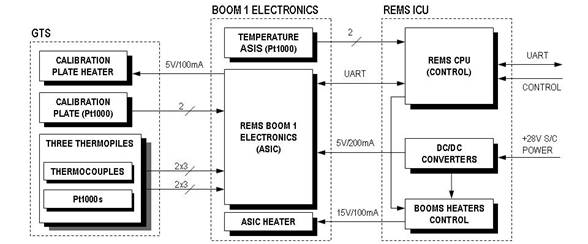
Las señales eléctricas de salida del GTS (tensión de salida de la termopila y la resistencia de los diferentes Pt1000 ,que están dentro de las termópilas y en la placa de calibración) es muestreada por la electrónica de REMS. Este sistema electrónico presenta una arquitectura distribuida (Figura 3). La Unidad de Control de Instrumentos (ICU) se encuentra dentro del cuerpo del rover de MSL , mientras que la electrónica de adquisición de datos se encuentra en boom. Esta arquitectura permite la optimización de pesos y tamaños y al mismo tiempo reducir el ruido acoplado en las señales analógicas. Para la adquisición de datos de REMS se utiliza un ASIC ( circuito integrado para aplicación específica) de señal mixta (Digital-Analógica), debido a las restricciones de espacio y peso.
Figura 3. Arquitectura electrónica del REMS GTS:
La tabla 3 resume el volumen de datos generados por el GTS y la estimación de energía consumida.
Tabla 3. GTS datos generados y consumo alimentación.
| Modo de Operación | Bit/Sec | Kbits/Sol | Potencia (mW) | Potencia/Sol (mWh) |
| Nominal (1sps durante 5 min cada hora) |
112 | 806.4 | 0.25 | 0.5 |
| Calibración en vuelo (1sps durante 15 min cada semana) |
112 | 14.4 | 500 | 17.8 |
| Total | 820.8 | 18.32 |
* El consumo de potencia del ASIC y energía necesaria para alcanzar la temperatura de funcionamiento no se considera.
Sensor de temperatura del suelo (GTS)
La temperatura superficial media de Marte es de 220 ºK y varía ampliamente a lo largo de un día marciano, de 145 ºK durante la noche polar a 300 ºK en el ecuador al mediodía en el punto más cercano de su órbita alrededor del Sol, con las variaciones diurnas de hasta 80 – 100 ºK.
Marte posee gradientes muy extremos de temperatura entre el suelo y la atmósfera. A 1,5 m sobre la superficie existen diferencias de ± 40 ºK.
Los valores de emisividad típicos de Marte van desde 6 a 25μm, variando entre 0.9 y 1.
Las medidas del GTS estan condicionadas por diferentes factores:
1. Eemisividad diferente a 1 e incertidumbre en su valor real, dando lugar a diferencias entre las temperaturas cinemática y de brillo.
2. La atmósfera marciana debido su composición de CO2, tiene una banda fuertemente absorbente a 15μm .
3. La atmósfera polvorienta Marciana absorbe y emite energía infrarroja dentro de la banda de medición, perturbando la energía que viene del suelo, y deteriorando el rendimiento del GTS.
4. El ambiente térmico en el que funciona el GTS (rover e instrumentos) genera perturbaciones que incrementan la incertidumbre de medida.