El sensor de viento de REMS mide la velocidad del viento horizontal y vertical, así como su dirección. El sensor se basa en la anemometría película caliente.
Hay dos unidades de viento en REMS y cada uno se monta en los dos booms separados. Estas barras están diseñadas para apoyar a las unidades sensor de viento con el fin de reducir los efectos aerodinámicos y minimizar el peso. Auges REMS se encuentran en el mastil del rover MSL y se coloca en un ángulo de 120 grados, y situado a una altura ligeramente diferente: la diferencia es de 50 mm. Los diferentes lugares de los brazos permite medir el viento en todas direcciones, y de esta manera se puede asegurar que la perturbación del mástil afecta a sólo una unidad del sensor a la vez.
Tabla de características del sensor de medición de viento:
|
Rango |
Resolución |
Muestreo |
|
|
Velocidad Horizontal |
0-70 m/s |
0.5 m/s |
1 Hz |
|
Dirección horizontal |
0º-360º |
30º |
1 Hz |
|
Velocidad Vertical |
0-10 m/s |
0.5 m/s |
1 Hz |
Cada unidad de sensor de viento se compone de tres tablas de transductores con cuatro dados calientes. Cada tarjeta del transductor de la unidad de sensor de viento se encuentra a 120 grados alrededor de la pluma (ver figura 1) para medir la velocidad del viento a lo largo de dos direcciones perpendiculares: transversal y longitudinal. Una combinación adecuada de todas las señales de los transductores de salida del viento proporcionará el valor de la velocidad del viento y la dirección absoluta.
Los cuatro dados caliente en cada junta del transductor se basan en anemometría de película caliente. Estos dados, que se montan en una configuración cuadrada, se mantienen a una diferencia de temperatura fija con respecto a una referencia mediante un electro-térmica lazo de control sigma-delta que suministra energía a la matriz caliente. El circuito mide la potencia entregada a la parte caliente, y como la diferencia de temperatura se conoce, la conductividad térmica para el CO2 es analizado. Con el fin de hacer esto, se requiere información adicional térmica para calcular la potencia perdida por conducción a través del apoyo y la unión de cable , así como la información térmica ambiental para evaluar las pérdidas por radiación.
Una descripción completa del concepto de la electrónica de los cuatro dados se pueden encontrar en (1).
Las pruebas de calibración del sensor de viento han incluido además de pruebas específicas en diversas instalaciones del túnel de viento de una amplia gama de simulaciones de fluidos para evaluar primero el impacto de la interferencia del rover (tanto aerodinámicos como térmicos) en la medición del viento, calibrar la influencia del mástil y, finalmente, para comparar y validar la respuesta del sensor de viento de dados calientes en las pruebas reales.
(1) M.Dominguez, V. Jimenez, J.Ricart, L.Kowalski, J. Torres, S. Navarro, J.Romeral L.Castañer ‘ A hot film anemometer for the Martian atmosphere, Planetary and Space Science, 56(2008), pp. 1169-1179.
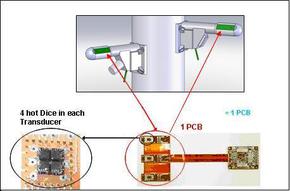
Figura 1. Ubicación del sensor de viento de REMSen el Rover Cam-Mast y la configuración del sensor de viento
Sensor de viento (WS)
El sensor de viento mide la velocidad y dirección del aire en tres puntos del cilindro. Combinando estos datos es posible calcular la dirección y velocidad del viento incidente sobre el boom.
En cada punto se utiliza un sensor de lamina caliente. La velocidad del aire es proporcional a la corriente necesaria para mantener la lamina a una temperatura constante.
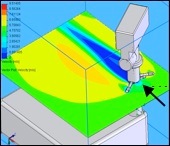
Simulación de la interacción del viento con el mastil del rover. Los diferentes colores representan diferentes velocidades y por lo tanto se puede estimar el nivel de perturbación de la corriente incidente.